Robotics Milestone: Hybrid Wheeled-Legged Platform Tackles North Area Terrain
By: Mario di Castro (BE – CEM) and MRO Section
A major robotics milestone was achieved in the North Area as a wheeled-legged robot was deployed for the very first time to perform a live inspection in TCC2.
Anomalies were recently identified in the movement of the XCSH.X0210045 collimator, and, for the first time at CERN, a wheeled-legged quadruped platform (GO2-W) was sent to carry out a visual inspection in an environment previously inaccessible to conventional robots.
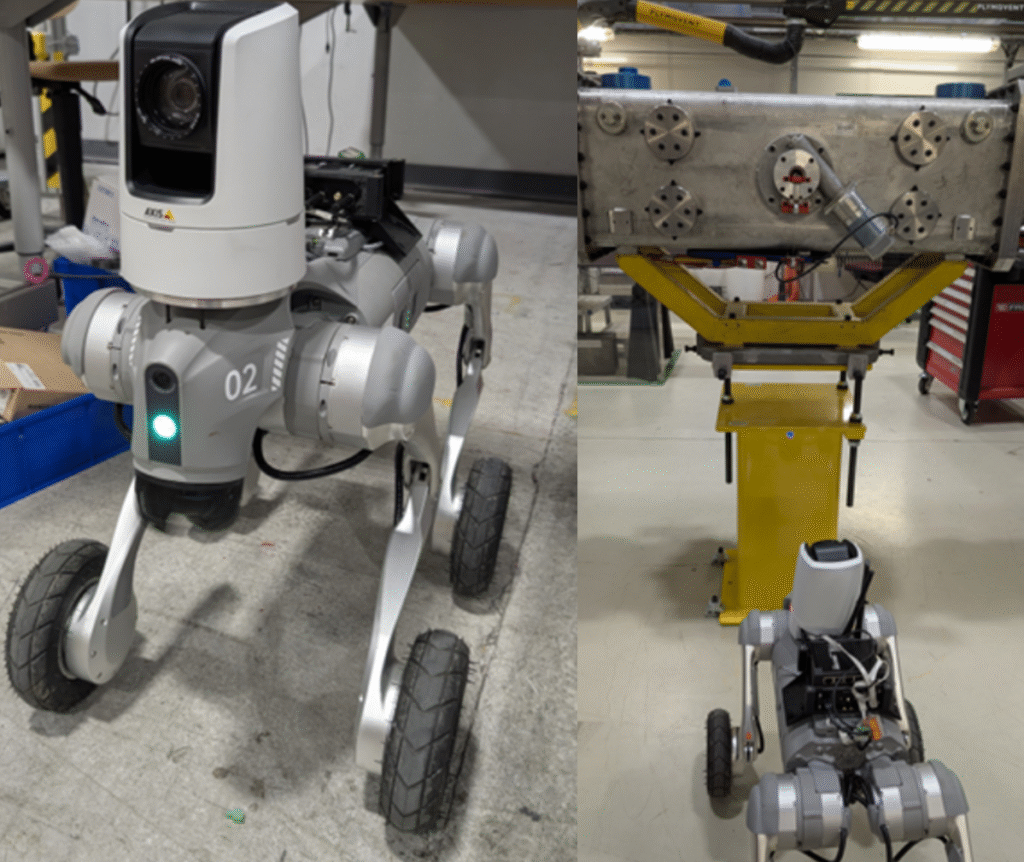
The BE-CEM robotics service already operates quadruped robots for difficult environments, but this intervention marked the first operational use of a hybrid wheeled-legged platform in such terrain. The addition of wheels to the legs enables more efficient movement over flat ground, reduced power consumption and extended operational range, while still allowing the robot to step over obstacles like a standard legged configuration.
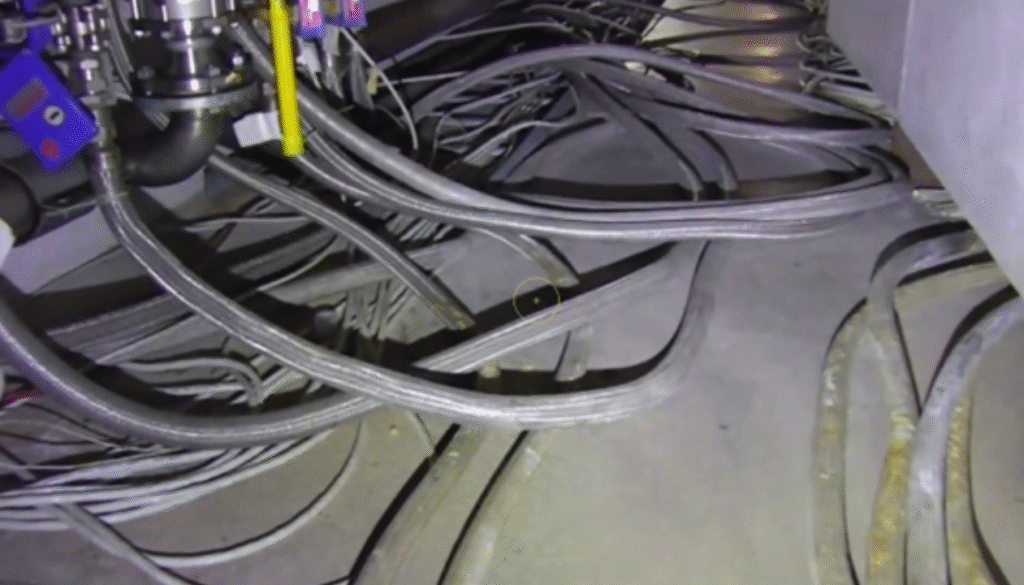
The collimator is installed deep inside TCC2, with access from BA80 requiring navigation under beamlines and across ramps, pipes, cables and gaps. These conditions make the area inaccessible to other robotic platforms, but the GO2-W was able to traverse the terrain with ease.
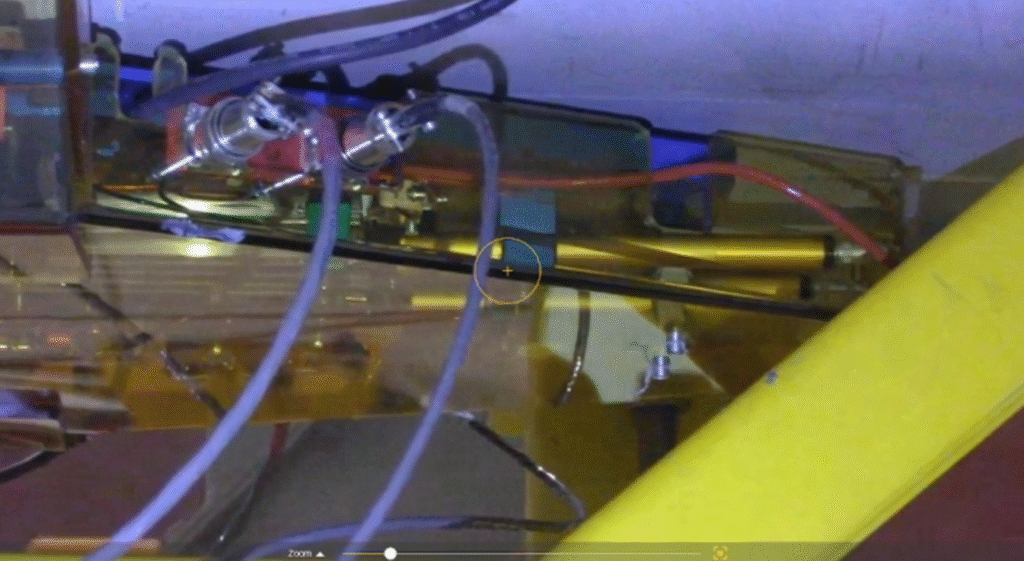
The mission was triggered when the position of one of the collimator jaws could not be confirmed via the potentiometer, and remote diagnosis was not sufficient. Deploying the robot enabled a visual inspection while saving cool-down time and significantly reducing dose exposure for personnel.
The robot was deployed via the BA80 elevator, descended into the cavern, passed through the guillotine door and entered the experimental area, while being remotely teleoperated from the robotics lab in building 927. It was equipped with a Pan-Tilt-Zoom (PTZ) camera, front-facing camera, spotlight, and 4G router to support navigation and inspection.
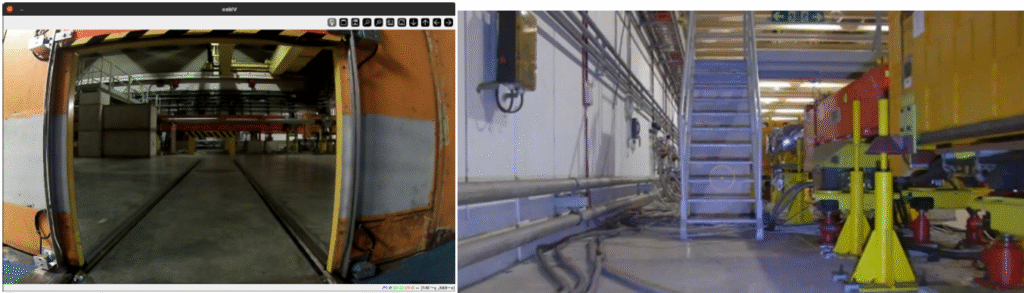
Once on site, the robot travelled under the beamline and negotiated ramps, cables and pipes using in-house control software. In one case, a misaligned ramp required a combination of wheeled and legged locomotion to pass safely.

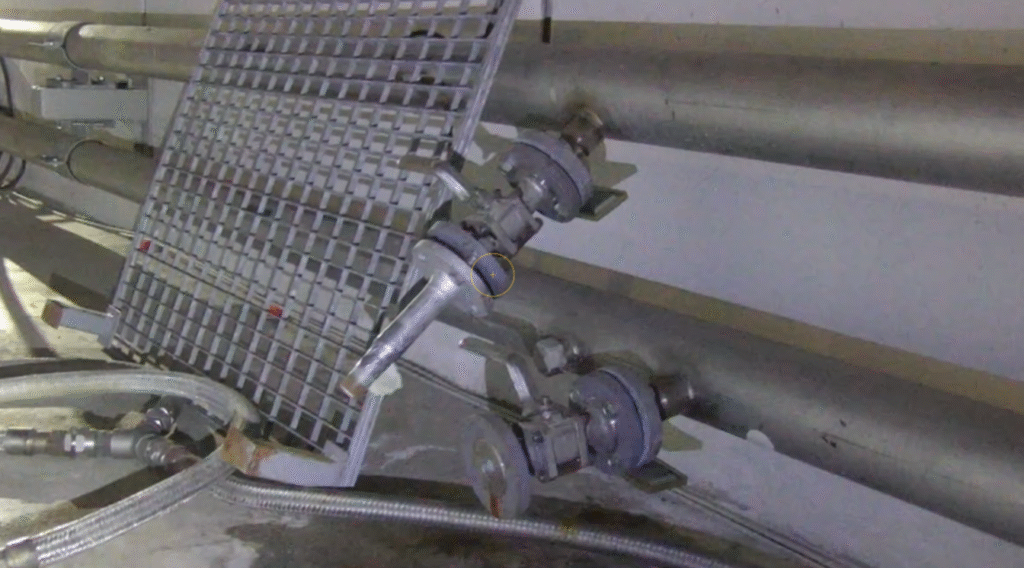
At the collimator, the PTZ camera streamed live images of the jaw motion, while personnel from the North Area experimental team supported the inspection. A series of tests assessed jaw synchronization and the health of the cable actuation system, confirming that the potentiometer was likely faulty and will be replaced during the next maintenance slot.
During its return to BA80, the robot also identified and localized a water leak, enabling early planning of repair work.
After contamination checks and RP wheel cleaning, the robot was safely removed and prepared for the next operation.

This successful intervention marks the first operational deployment of a wheeled-legged robot in the North Area, demonstrating the adaptability and value of this new addition to CERN’s robotic fleet, with further CERN-endorsed control and development already underway to extend its future capabilities.