CRANEbot Validates Remote Maintenance Procedure for ATLAS VAX M1
A remote-handling test of the VAX M1 vacuum module was successfully carried out in the ATLAS cavern using the CRANEbot robot developed within the BE-CEM group.
Within the framework of the High Luminosity LHC (HL-LHC) project, the VAX (Vacuum Assembly for eXperimental area) integrates a compact set of vacuum and instrumentation components installed on the experimental side of ATLAS and CMS. The system is designed to decouple the machine vacuum from the experimental vacuum.
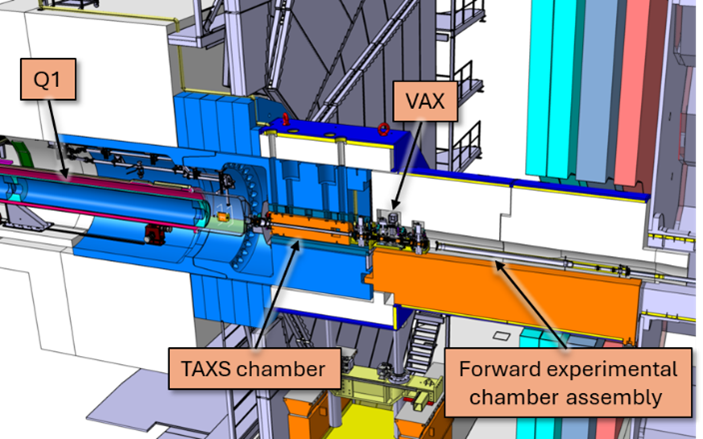
The VAX assembly consists of three modular units incorporating sector valves and vacuum sectors connected by expansion joints. Due to limited accessibility and the high radiation levels expected in the VAX area, all installation and maintenance operations must be performed remotely using robotic systems, in accordance with the ALARA principle.
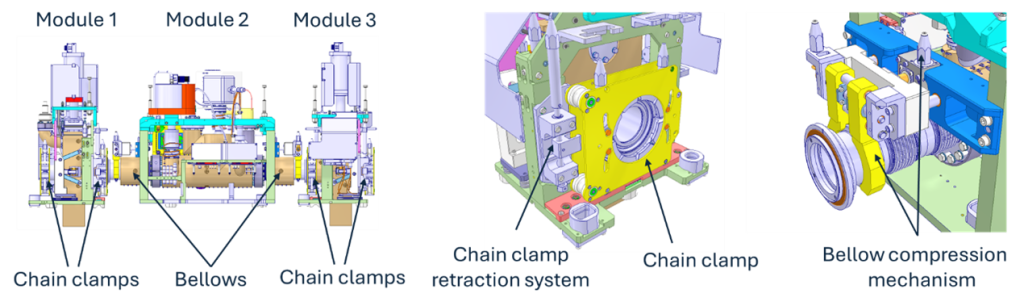
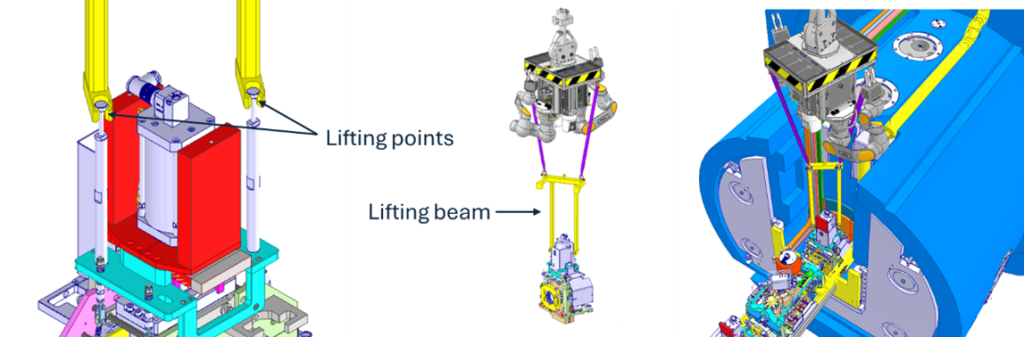
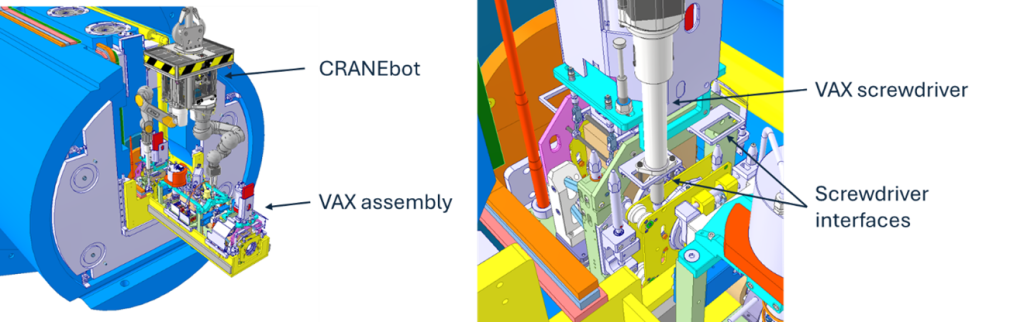
During the test, the CRANEbot—suspended from the cavern overhead crane—was used to lift, transport and position the modules using a dedicated lifting beam. A specially designed robotic screwdriver tool, controlled via the CERN-developed Human-Robot Interface (HRI), allowed operators to remotely actuate the bellows mechanisms and tighten the vacuum flange connections with controlled torque.
Following earlier validation tests using a mock-up installation setup, the operation was successfully reproduced in situ in the ATLAS cavern, marking the first remote installation and removal test of the M1 module in an ATLAS-like environment.

To reproduce realistic maintenance conditions, the test was performed using a shielding mock-up together with the cavern crane. The robot and crane were remotely operated from a restricted-view area, simulating a potential radiation-safe control location for future interventions.
The module installation sequence was successfully completed and subsequently reversed to simulate a removal procedure in the event of a fault.

This successful validation represents an important step toward fully remote maintenance of vacuum systems in high-radiation environments, highlighting the close collaboration between the BE-CEM robotics team and the vacuum, survey and transport groups within the HL-LHC Project.